机器学习算法常常需要大量的数学计算,尤其是一些需要迭代求解的算法。
优化算法和解线性方程时,当这些函数涉及到实数操作时,就要在数值精度和内存两者之间做权衡了。
4.1 上溢出和下溢出(Overflow and Underflow)
使用数字计算机表示连续变量时,需要用有限的bit来表示无限的实数。这意味着,对于大部分的实数,有精度上的损失。这样的误差叫做舍入误差。舍入误差包括Underflow和Overflow。
Underflow:当数值接近0时,被舍入为0。
Overflow:当数值逼近正负无穷时,数值变为Not-A-Number(NAN)。
Softmax函数就一个要同时处理Unverflow和Overflow的函数
$$
\text {softmax }(x)_i=\frac{\exp(x_i)}{\sum_{j=1}^{n}\exp (x_j)}
$$
假设$x_i$为常数$c$,这时函数应该为$\frac{1}{n}$。当$c$为负且很大时,这时会出现Underflow;当$c$为正且很大时,竟会出现Overflow。用线性代数处理一下$z=x-\max(x_i)$,再求$\text {softmax}(z)$即可。
还有一个小的问题。分子的underflow可能会导致整个表达式为零。即,如果首先计算softmax函数,然后把结果传递给log函数,可能会得到$-\infty$。可以使用同样方法避免这个问题。
在使用算法时,可能不会考虑溢出问题,因为一些底层库的作者常常已经处理好这个问题了。当时,要时刻意识到这个问题。
4.2 Poor Conditioning
Condition是指函数输入变化时,它的输出变化的快慢。输入微小变化就能引起输出很大波动的的函数,对于科学计算来说,有问题。因为数据可能存在噪声(或预处理存在噪声),噪声很大程度影响了输出。
例如函数$f(x)=A^{-1}x$,其中$A \in R^{n \times n}$,且有特征值,那么它的condition number 就是
$$
\max_{i,j}\frac{\lambda_i}{\lambda_j}
$$
这个比值就是幅度最大的特征值和幅度最小的特征值的比值。如果比值很大,那么矩阵的逆对输入就很敏感。
这种敏感是矩阵本身的特性,而不是求逆过程中的误差。这样的矩阵会放大预处理的误差。
4.3梯度下降最优化
大多数机器学习都会涉及到最优化;最优化是指最大化$f(x)$或最小化$-f(x)$。要最大化或最小化的函数叫做目标函数或准则;如果最小化它时,常常叫做代价函数、损失函数或误差函数。
最下滑函数,常常使用梯度下降法。但是在梯度为零的点,梯度没有为我们提供信息。梯度为零$f^{‘}(x)$的点,是关键点或驻点(critical points or stationary point)。梯度为零的点,可以是局部最小值,或者是局部最大值,也可能是鞍点(saddle point)。如下图: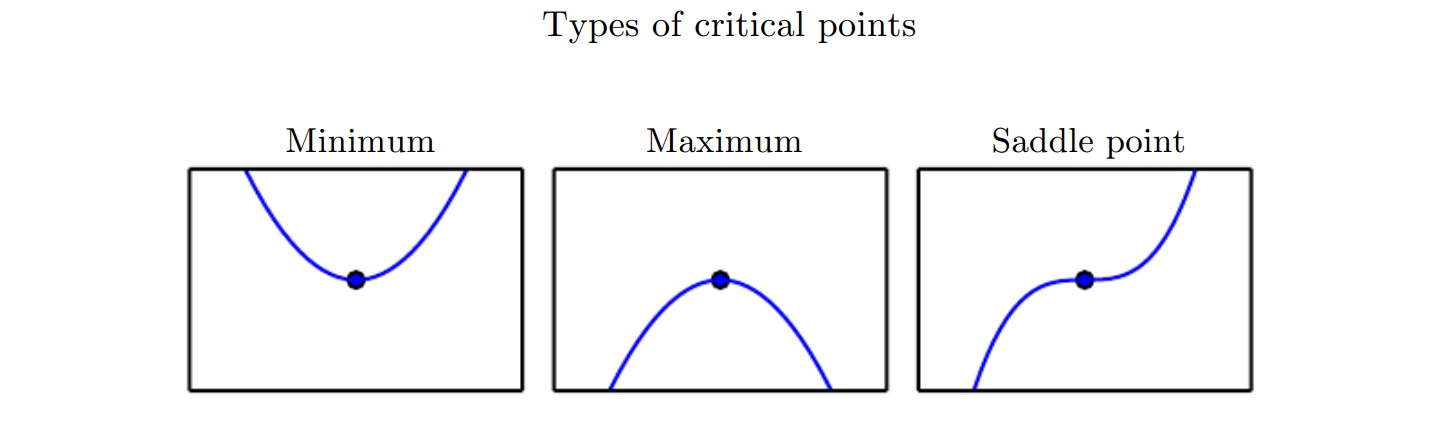
局部最小值可能不是全局最小值,全局最小才是最优。在深度学习中,优化的函数有许多局部最小值和鞍点;尤其是当优化目标函数为多维函数时。下图是一维情况的简单描述: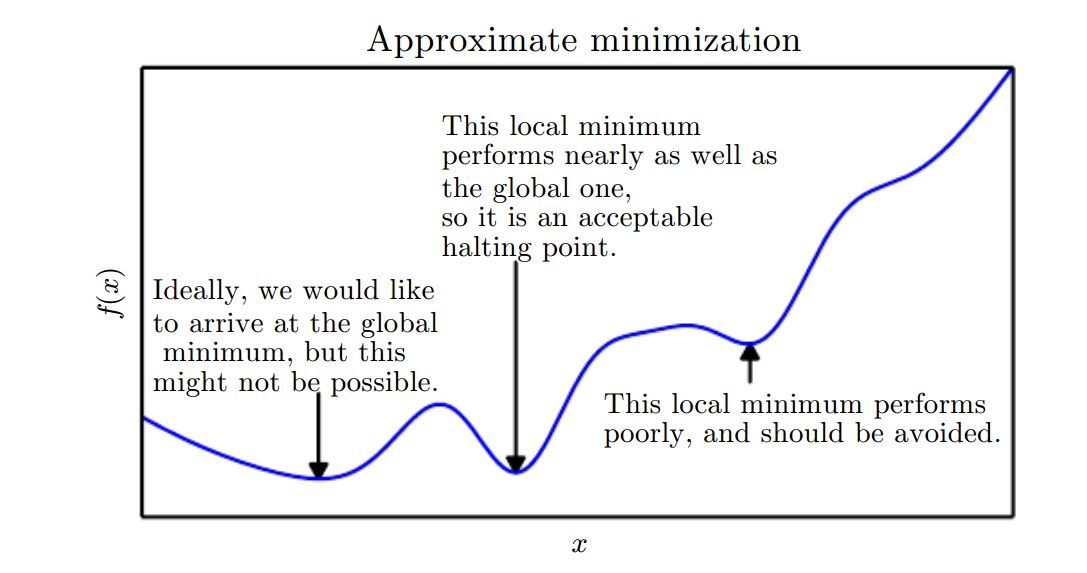
我们优化的函数,输入可能是多维的,但输入是一维的:$f:R^n \to R$。输入是多维时,对某一维变量求导就是偏导了$\frac{\partial}{\partial x_i}f(x)$。对函数就到得到的梯度就是一个向量了$\nabla_x f(x)$,其中每一个元素都是偏导。
在某个方向$u$(向量)上的导数为$\frac{\partial}{\partial \alpha} f(x + \alpha u) =u^T \nabla_x f(x)$。
最小化$f$就是找到一个方向,在这个方向上下降最快。实际上,梯度是上升最快的方向,其反方向就是下降最快的方向。沿着梯度反方向下降的方法,叫做最速下降法(steepest descent)或梯度下降(gradient descent)。
最速下降法使用如下:
$$
x^{'} = x - \epsilon \nabla_x f(x)
$$
这里$\epsilon$叫做学习率,它指示在下降过程中的步长,可以设置不同的值。最流行的做法是把它设置为常数。有时,还用通过设置步长,防止梯度消失。还有一种设置步长的方法,通过计算不同$\epsilon$时,目标函数$f(x - \epsilon \nabla_x f(x))$的大小,来选择最优的学习率;这种策略叫做线性搜索。
梯度下降只能用在连续空间。但是其思想:通过一步步移动,找到最优点,可以用到离散空间。
4.3.1 Beyond the Gradient:雅克比矩阵和海森矩阵
对于输入和输出都是多维情况,这时求其偏导,可以得到雅克比矩阵(Jacobian Matrices)。函数$f:R^m \to R^n$,那么雅克比矩阵$J \in R^{n \times m}$,矩阵中的每个变量
$$
J_{i,j} = \frac{\partial}{\partial x_j}f(x)_i
$$
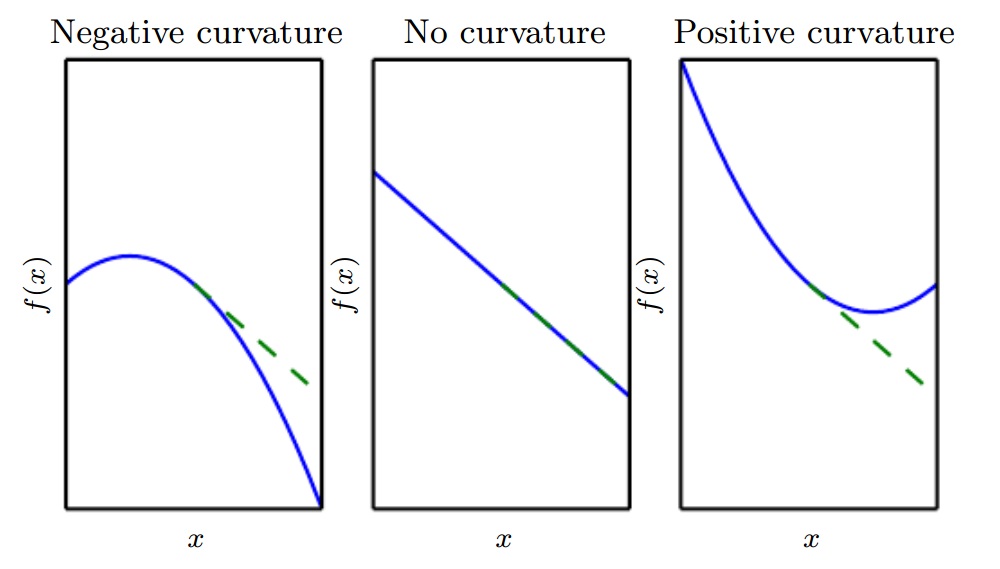
对于函数$f:R^n \to R$,求它导数的导数,即二阶导数,可以得到海森矩阵。二阶导数告诉我们一阶导数随输入变量变化而变化的情况。二阶导数很重要,它可以告诉我们基于一阶导数梯度步长,将会引起多大提高。可以把二阶导数想象为衡量弯曲。例如,有一个二次函数,如果它二阶导数为零,那么它是一条直线,没有弯曲。假设梯度为1,如果二阶导数为负,那么其开口向下,函数$f(x)$下降幅度大于$\epsilon$;如果二阶导数为正,那么其下降小于步长。如下图:
二阶导数定义的矩阵,叫做海森矩阵:
$$
H(f)(f)_{i,j}=\frac{\partial^2}{\partial x_i \partial x_j}f(x)
$$
求导符合交换律,即:
$$
H(f)(f)_{i,j}=\frac{\partial^2}{\partial x_j \partial x_i}f(x)
$$
即海森矩阵是对称矩阵$H{i,j} = H{j,i}$。海森矩阵是对称的实数矩阵,可以分解为特征值和特征向量,且特征值为实数。二阶微分,在某一方向$d$表示为$d^THd$,其中$d$是$H$的单位特征向量,在此方向上的值为特征向量对应的特征值。对于其他的方向,是单位特征向量的加权和。最大的特征值对应最大二阶导数,最小特征值对应最小二阶导数。
二阶导数的方向可以告诉我们梯度下降算法下降的幅度。用二阶泰勒级数在$x^{(0)}$处展开目标函数可以得到:
$$
f(x) \approx f(x^{(0)}) + (x - x^{(0)})^Tg+\frac{1}{2}(x-x^{(0)})^T H(x-x^{(0)})(x-x^{(0)})
$$
这里$g$是梯度,$H$是海森矩阵。如果学习率为$\epsilon$是学习率用$x^{(0)} - \epsilon g$代替$x$,可以得到:
$$
f(x^{(0)} - \epsilon g) \approx f(x^{(0)}) - \epsilon g^Tg + \frac{1}{2}\epsilon^2 g^THg
$$
使用梯度下降算法,步长为 $\epsilon$时,下降大小为$- \epsilon g^Tg + \frac{1}{2}\epsilon^2 g^THg$。当后面一项比较大时,目标函数可能没有变小;当$g^THg$为负数或为零时,学习率为任何值,都会下降。在使用泰勒级数时,如果$\epsilon$比较大时,二项展开精度可能就不高。如果$g^THg$为正数,那么最佳学习率为
$$
\epsilon^* = \frac{g^Tg}{g^THg}
$$
最坏情况下,当$g$和$H$的最大特征值对应的特征向量平行时,最佳步长为$\frac{1}{\lambda_{max}}$
二阶导数可以判断关键是是局部最小、局部最大、鞍点。关键点处$f^{‘}(x)=0$;如果$f^{‘’}(x)> 0$,意味着如果$f^{‘}(x)$向右移动大于零,向左移动小于零,即$f^{‘}(x-\epsilon)<0, f^{‘}(x+\epsilon)>0$f^{‘}(x-\epsilon)<0f^{‘}(x-\epsilon)<0f^{‘}(x-\epsilon)<0,可以得到此处为局部最小值。同理当$f^{‘}(x) = 0, f^{‘’}(x) < 0$时,此处为局部最大值。当$f^{‘}(x) = 0, f^{‘’}(x) = 0$,这时不能得到确切的结论,此时$x$可能为鞍点,或一段平坦区域。
对于多维情况,同一点不同方向导数不同。海森矩阵的condition number衡量二阶导数变化情况,如果海森矩阵的condition number是poor的,那么梯度下降性能不好。因为在某一点的一个方向,梯度可能下降很快,但是在另一个方向,梯度下降很慢;这时很难选择一个全局的学习率。如下图所示:
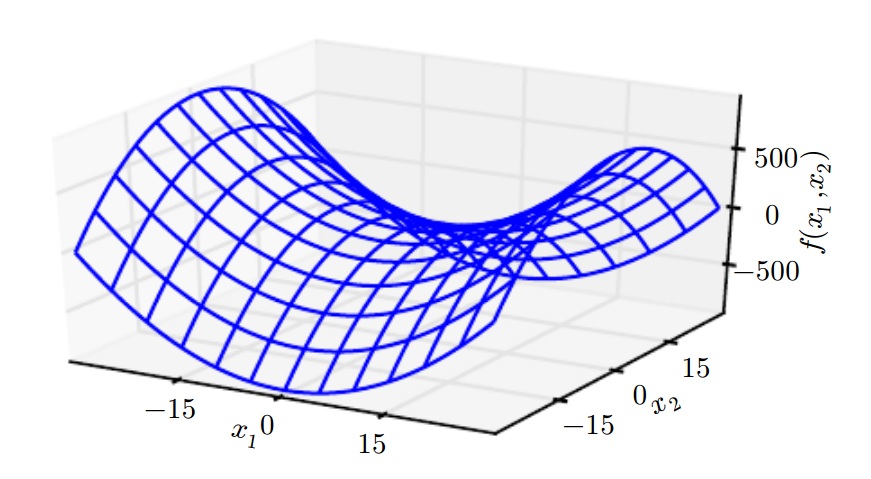
在上图中,方向[1,1]上的弯曲率最大,方向[1,-1]上的弯曲率最小。红色的线是梯度下降时,行走的路线。可以看到,来回走动,浪费很多步。
可以使用从海森矩阵中得到的信息来指导搜索。最简单的方法是牛顿法。牛顿法是基于二阶导数的泰勒展开的:
$$
f(x) \approx f(x^{(0)}) + (x - x^{(0)})^Tg+\frac{1}{2}(x-x^{(0)})^T H(x-x^{(0)})(x-x^{(0)})
$$
对于关键点,求解函数,得到
$$
x^* = x^{(0)} - H(f)(x^{(0)})^{-1} \nabla_x f(x^{(0)})
$$
当函数$f$是二次时,只需要一步即可跳到最优解。当函数不是正定的,但是可以近似为二次正定的,可以迭代使用上面公式,这样比梯度下降法要快。这在局部最小值附近时是个有用的特性,但是牛顿法只能在局部最小值附近来近似。
梯度下降是一阶导数的优化算法,牛顿法是二阶导数的最优化算法。这些最优化算法可以用到大多数的深度学习应用中,但是不确保一定有效。因为深度学习中,用到的函数十分复杂。有时需要给函数加上Lipschitz连续限制。Lipschitz连续函数为:
$$
\forall x, \forall y, |f(x) - f(y)| \leq \varsigma ||x-y||_2
$$
其中$\varsigma$是Lipschitz限制。这时一个很有用的特性,因为输入上的微小变量,将会引起输出上的微小变化。Lipschitz限制是一个弱限制,深度学习中的许多问题可以经过微小修改获取Lipschitz连续性。
在优化领域,最成功的领域是凸优化。凸优化通过许多强限制来加以保证。凸优化只能用来解决凸函数,海森矩阵为半正定的函数才是凸函数;这样的函数没有鞍点,局部最小值即为全局最小值。但是深度学习中,目标函数往往不是凸函数。凸函数优化只能用作深度学习的一个分支。
4.4 受限的优化问题
有时我们要在限制输入满足$x$一定条件情况来,来最小化目标函数。这就是受限的优化问题。
常常用的一种方法是把受限条件考虑到目标函数中,然后再来优化新的目标函数。
一种复杂的方法,是把受限问题转换为不受限的问题来解决。
Karush-Kuhn-Tucker(KKT)方法提供了解决受限问题的一种通用方法。这里介绍一种新的方法,拉格朗日乘子法或拉格朗日函数。
在定义拉格朗日函数前,先定义受限集合的描述,假设受限约束有m个等式和n个不等式描述。受限集合$S={x|\forall i,g^{(i)}=0 \quad \text{and} \forall j, h^{(j)} \leq 0}$。为每个约束引入新的变量$\lambda_i, \alpha_j$,它们叫做KKT乘子,拉格朗日函数定义如下:
$$
L(x, \lambda, \alpha) = f(x) + \sum_i \lambda_i g^{(i)}(x) + \sum_j \alpha_j h^{(j)}(x)
$$
这样就可以用不受限的优化问题解决受限的优化问题。注意到只有存在可行点,那么$f(x)$就不能有无穷大值点,那么
$$
\min_{x} \max_{\lambda} \max_{\alpha, \alpha \geq 0} L(x, \lambda, \alpha)
$$
和
$$
\min_{x \in S}f(x)
$$
有相同的优化目标和结果集。这时因为满足
$$
\max_{\lambda} \max_{\alpha, \alpha \geq 0} L(x, \lambda, \alpha) = f(x)
$$
违反
$$
\max_{\lambda} \max_{\alpha, \alpha \geq 0} L(x, \lambda, \alpha) = \infty
$$
这条性质确保在可行性点不变情况下,非可行性点不会得到优化。
不等式的约束很有趣。如果$h^{(i)}(x^*)=0$,那么这个不等式就是激活的。否则,这个不等式就是没有激活的。如果一个约束没有激活,那么使用这个约束得到的解,至少是不使用这个约束时,问题的局部解。没有激活的约束也会排除一些解。例如一个凸优化问题,没有约束时,它的解的范围是全局任何点;也可以使用一些约束把它解的范围约束到一个集合范围内。但是在收敛处的点,不管约束有没有激活,它都是个stationary point。因为没有激活的约束$h^{(i)}$是负值,那么对于变形后的目标函数$\min{x} \max{\lambda} \max_{\alpha, \alpha \geq 0} L(x, \lambda, \alpha)$,将会有$\alpha_i=0$,因此可以得到$\alpha h(x)=0$,即约束$\alpha_i \geq 0$和$h^{(i)}(x) \leq 0$中,至少有一个是激活的。
泛化后的拉格朗日梯度为零,对于$x$约束和KKT乘数都必须满足,且$\alpha \odot h(x)=0$,这些约束叫做KKT条件。
4.5例子:线性最小平方
要最小化下面目标函数
$$
f(x) = \frac{1}{2}||Ax-b||_2^2
$$
第一步,求得梯度
$$
\nabla_x f(x) = A^T(Ax-b)=A^TAx-A^Tb
$$
使用梯度下降,按照以下步骤
1、设置步长和容忍方差$\delta$
$\text {while} \quad ||A^TAx-A^Tb||_2 > \delta \quad do$
$\quad x \leftarrow x - \epsilon (A^TAx-A^Tb)$
$\text{end while}$
也可以使用牛顿法求解,因为函数是二次的,可以一步得到全局最优解。
如果给输入加上约束$x^Tx \leq 1$,得到拉格朗日函数
$$
L(x,\lambda) = f(x) + \lambda(x^Tx-1)
$$
有约束问题变为无约束问题
$$
\min_x \max_{\lambda, \lambda \geq 0} L(x,\lambda)
$$
朗格朗日函数对$x$求导,得到
$$
A^TAx - A^Tb + 2 \lambda x = 0
$$
得到的解的形式为:
$$
x = (A^TA+2\lambda I)^{-1}A^T b
$$
$\lambda$幅度必须满足约束。对它求导
$$
\frac{\partial}{\partial \lambda}L(x,\lambda)=x^T x -1
$$
当$x$范数大于1时,上面导数为正;增大$\lambda$拉格朗日函数值随之增大。因为$x^Tx$的系数增大,所以$x^Tx$将会变小(因为我们在最小化朗格朗日函数)。如此重复,直到$\lambda$导数为零。